Cara membuat line follower robot untuk pemula
Pada kesempatan kali ini saya akan membahas bagaimana cara membuat line follower robot atau robot yang mengikuti garis. Membuat line follower robot memang tidak gampang, dalam pembuatannya diperlukan banyak komponen elektronika dan program-program yang dibuat untuk line follower robot ini.
Sebelum masuk kedalam proses pembuatannya apakah kalian tau apa itu line follower robot? jika sudah mengetahuinya apa itu line follower robot berarti kalian tentunya sudah pernah belajar atau mencoba untuk membuatnya. Tapi jika kalian belum tau, saya akan menjelasakannya sedikit tentang line follower robot.
Jadi line follower robot adalah sebuah robot yang dirancang khusus untuk berjalan mengikuti garis berwarna hitam sesuai dengan program yang telah dibuat. Jadi initinya robot ini bisa dibilang robot sederhana yang bisa menjalankan program-program yang sudah dibuat dan dimasukkan ke dalam otak robot.
Line follower robot ini bisa membantu manusia tergantung dari proses pembuatannya yang bertujuan untuk membantu proses kerja manusia. Biasanya robot ini digunakan dalam perusahaan atau pabrik-pabrik yang membutuhkan tenaga robot dalam proses produksinya. Namun selain juga bisa membantu manusia line follower robot ini juga bisa digunakan untuk kontes adu balap robot.
Nahh jika sudah mengerti apa itu line follower robot, mari langsung ke cara pembuatannya..Dalam membuat Robot Line Follower saya akan membagi beberapa langkah :
1. Merancang skema rangkaian dari robot
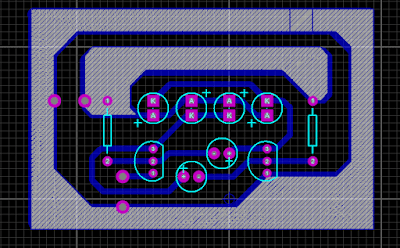
2. Membuat layout dari skema yang telah dibuat
3. Menyablon serta mencetak pcb
4. Melubangi pcb
5. Menyolder rangkaian
6. Membentuk desain dari body robot
7. Memprogram robot
8. Menguji robot yang telah dibuat
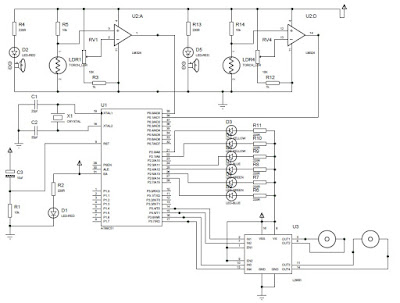
Berikut adalah skema Line follower robot
Sebelum masuk kedalam proses pembuatannya apakah kalian tau apa itu line follower robot? jika sudah mengetahuinya apa itu line follower robot berarti kalian tentunya sudah pernah belajar atau mencoba untuk membuatnya. Tapi jika kalian belum tau, saya akan menjelasakannya sedikit tentang line follower robot.
Jadi line follower robot adalah sebuah robot yang dirancang khusus untuk berjalan mengikuti garis berwarna hitam sesuai dengan program yang telah dibuat. Jadi initinya robot ini bisa dibilang robot sederhana yang bisa menjalankan program-program yang sudah dibuat dan dimasukkan ke dalam otak robot.
Line follower robot ini bisa membantu manusia tergantung dari proses pembuatannya yang bertujuan untuk membantu proses kerja manusia. Biasanya robot ini digunakan dalam perusahaan atau pabrik-pabrik yang membutuhkan tenaga robot dalam proses produksinya. Namun selain juga bisa membantu manusia line follower robot ini juga bisa digunakan untuk kontes adu balap robot.
Nahh jika sudah mengerti apa itu line follower robot, mari langsung ke cara pembuatannya..Dalam membuat Robot Line Follower saya akan membagi beberapa langkah :
1. Merancang skema rangkaian dari robot
2. Membuat layout dari skema yang telah dibuat
3. Menyablon serta mencetak pcb
4. Melubangi pcb
5. Menyolder rangkaian
6. Membentuk desain dari body robot
7. Memprogram robot
8. Menguji robot yang telah dibuat
Berikut adalah skema Line follower robot

Dalam rangkaian line follower terbagi menjadi 2 macam yaitu :
- Sismin dan driver
- Comparator dan sensor
1. Sismin dan driver
Pertama saya akan memulai proses pembuatannya dari Sismin dan driver terlebih dahulu. Rangkaian yang pertama kali dibuat adalah rangkaian bagian otak robot yaitu Sismin dan driver, Sismin adalah singkatan dari kata Sistem Minimum, jadi fungsi dari sistem minimum ini adalah agar IC pada robot bisa diprogram dan menjalankan perintah programnya.
Didalam rangkaian sismin dan driver saya menggunakan IC mikrokontroler At89s51 sebagai otak dari robot yang berfungsi menjalankan semua perintah program yang telah dibuat. Dan sebuah IC driver L293D yang berfungsi menggerakkan motor.
Didalam rangkaian sismin dan driver terdapat beberapa komponen elektronika yaitu :
- IC At89s51 (1 buah)
- IC L293D (1 buah)
- Motor (2 buah)
- Kapasitor 22pf (2 buah)
- Crystal (1 buah)
- Kapasitor elektrik 10uf (1 buah)
- Resistor 10k ohm dan 220 ohm (masing-masing 1 buah)
- Led red (1 buah)
2. Comparator dan sensor
Rangkaian ini adalah rangkaian yang berfungsi sebagai indra robot terutama adalah rangkaian sensornya. Dalam rangkaian ini saya menggunakan salah satu jenis sensor cahaya yaitu Photo diode sebagai sensor untuk membaca garis.
penggunaan Photo diode jauh lebih baik ketimbang menggunakan sensor cahaya LDR, karena jika menggunakan sensor cahaya LDR maka sinar apasaja bisa terbaca oleh LDR sehingga dapat mengganggu dalam proses pembacaan garis hitam.
Sedangkan photo diode tidak bisa membaca sinar matahari atau sinar dari senter, melainkan hanya bisa membaca sinar dari infra red. Sehingga dalam proses pembacaan garis tidak terganggu oleh cahaya lain dan robot bisa berjalan dengan baik.
Dalam rangkaian Comparator terdapat IC yang digunakan untuk mengolah hasil output yang dikeluarkan oleh sensor. IC itu adalah IC LM324. IC ini berfungsi untuk mengolah hasil output sensor menjadi keluaran yang bisa dibaca oleh IC mikrokontroler.
Berikut adalah komponen yang ada didalam rangkaian comparator dan sensor yaitu :
- Photo diode (2 buah
- Infra red (2 buah)
- IC LM324 (1 buah)
- Resistor 220 ohm (2 buah)
- Resistor 1k ohm (2 buah)
- Resistor 10k ohm (2 buah)
- Trimpot 10k ohm (2 buah)
Catatan :
untuk gambar sensor dari skema ini kalian bisa ganti sensor LDR dengan photo diode dan mengganti Led red dengan infra red.


kurang paham saya gan, tapi saya akan mencoba
ReplyDeleteOke gan selamat belajar terus mencoba walaupun gagal
DeleteMantapp nihh membuatt robott, kebetulan ane juga lagii belajar belajar mengenai robotik
ReplyDeleteBiar saya pahami dulu gan nanti kalo udah paham bisa dicoba
ReplyDeletepenjelasannya menurut ane kurang terperinci gan. soalnya banyak orang awam ttg robot juga. tapi sudah bagus lah artikel nya sukses terus gan :)
ReplyDeleteTerimakasih masukannya gan, memang benar ini masih baru setengah yg saya post gan, masih banyak yg belum saya tambahin di sini karena keterbatasan waktu juga. Nanti lain hari saya tambahin lagi gan. 😊
DeleteAne udah pernah bikin gan tapi udah jarang jadi agak lupa, :D
ReplyDeletewih kreatif nih
ReplyDeleteKira - Kira untuk beli Alat - Alat yang di perlukan butuh dana berapa ya gan ??
ReplyDeleteDilihat dari banyaknya komponen elektronika yg digunakan, kemungkinan dana yg keluar lumayan besar, terutama ic mikrokontroler pemrograman harga 1 komponen ini saja sudah mahal belum ditambah dengan komponen2 yg lain. Tapi gk ada salahnya nyoba bikin gan, soalnya kalo udah jadi robotnya bakal ada rasa kepuasan tersendiri.. :D
DeleteWoh baguus artikelnya, kebetulan temen ku lagi nyari ini.. Makasih mas
ReplyDeleteGak bisa di di download mas linknya
ReplyDelete